
9.2: Two Body Problem
- Page ID
- 5670
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The meaning behind Kepler's third law
Kepler used Tycho's measurements of the planet positions over time to empirically derive the mathematical relationship captured in Kepler's third law. However, Kepler did not have a physical explanation for why the planets orbited the Sun. This is a good example of how science works. We make observations, try to fit the observations with a mathematical model and then look for an elegant generalization that is both descriptive and predictive. If the mathematical generalization holds up under intense scrutiny, it is elevated to have the status of a theory.
About sixty years after Kepler published his third law for how the motion of planets in our solar system behaved, Isaac Newton (1643 - 1727) helped us to understand the "why." Newton developed a mathematical description of gravity as a force between two particles that is proportional to the product of the particle masses (\(M_1\) and \(M_2\)) and inversely proportional to the square of the distance, \(d\), between them:
\[F_g\,=\frac{GM_1M_2}{d^2}\]
where the constant of proportionality is \(G\,=\,6.67408×10^{−11} m^3kg^{−1}s^{−2}\).
Newton's Laws for Forces
- Unless acted on by an unopposed force, bodies at rest stay at rest, and bodies in motion stay in motion.
- The vector sum of forces is equal to mass times the vector acceleration: \(\sum F\vec \,=\,m a\vec\)
- For every action, there is an equal and opposite reaction.
From first principles, Newton was able to show that the orbits of planets around the Sun could be described by a gravitational force. Starting with Newton's second law, \(F\,=ma\), and using the definition of centripetal acceleration, \(a\,=\frac{v^2}{a_{rel}}\) where \(a_{rel}\) is the orbital radius, or the distance between the star and planet:
\[F_G\,=\frac{GM_{\odot}m_{planet}}{a_{rel}^2}\,=\,m_{planet}\frac{v^2}{a_{rel}}\]
\[\frac{GM_{\odot}}{a_{rel}}\,=\,v^2\]
where \(M_{\odot}\) is the mass of the Sun (1.989×1030 kg) and \(v\) is the velocity of the planet.
The orbital period, \(P\), of the planet is the distance that the planet travels around the circular orbit divided by velocity (check and you'll see that distance / velocity has units of time, appropriate for an orbital period):
\[P\,=\frac{2\pi a_{rel}}{v}\,=\frac{2\pi a_{rel}}{\sqrt{\frac{GM_{\odot}}{a_{rel}}}}\]
\[P^2\,=\left{(\frac{4\pi^2}{G}\right)\,\frac{a_{rel}^3}{M_{\odot}\]
This is Newton's version of Kepler's third law: the square of the orbital period is proportional to the cube of the semi-major axis. With Newton's version of this law, we are no longer limited to describing the motion of planets in the solar system. We can change the mass of the star to find a new constant of proportionality between orbital period, \(P\) and the semi-major axis, \(a_{rel}\) in the equations above, in other exoplanet systems.
As with Kepler's third law in the previous section, we can define convenient units to make this calculation easier. By definition, the orbit of the Earth is 1 year and the average distance between the Sun and the Earth (the semi-major axis of the Earth's orbit) is 1 Astronomical Unit (1 AU = 149,597,870,700 km = 92,955,000 miles). So, if we adopt those same units (period in units of years, semi-major axis in units of AU, and stellar masses in units of solar masses) we can make some quick calculations for other planetary systems. After dividing both sides of equation 4.2.5 by the values for our solar system, the constants will cancel out, leaving an easy and useful equation (the required dimensions are in square brackets):
\[P^2[yr]\,=\frac{a_{rel}^3\,[AU]}{M\,[M_{\odot}]\]
Example \(\PageIndex{1}\)
A star that is 0.5 times the mass of the Sun has a planet in a 730.5 day orbit. What is the semi-major axis of the orbit?
First, change the period from days into years: 730.5 d = 2 yr.
Then, \(a_{rel}\,=\,(0.5\times 2^2)^{1/3}\,=1.26\) Astronomical Units (AU).
Frame of reference
So far, we've assumed a simplification: we have been working in the frame of reference of the Sun. There is nothing wrong with this, we just have to understand that in this reference frame, the Sun is not moving - the planets orbit the Sun and the elliptical orbit has semi-major axes for the planets that are relative to the Sun. However, Newton's third law tells us that while the Sun exerts a gravitational force on a planet, that planet also exert a gravitational force on the Sun. The planets cause the Sun to wobble in an orbit about a common center of mass.
Let's first begin with the classic 2-body problem: a star is orbited by a single planet. Later, we'll discuss what happens when there are \(N\) bodies orbiting the star. In the 2-body problem, we change our reference frame from the star to the center of mass. The center of mass (COM) is a point along a line that connects two objects (for the discussion here, the two objects are a star and planet) such that:
\[M_{\ast}r_{\ast}\,=\,m_{planet}r_{planet}\]
The star is located a distance \(r_{\ast}\) away and orbits the COM. The planet also orbits the COM, but at a larger distance (since it is universally true that \(M_{\ast}\gt m_{planet}\) then it is also always true that (r_{planet}\gt R_{\ast}\). In the COM frame, it is the center of mass that is stationary. The animation below depicts the motion of the star and planet relative to the COM. Notice that at any point in the orbit a line can be drawn from the star through the COM to the planet.
For some of the detection techniques (the Doppler method and astrometry) that we discuss in the next chapter, we measure the orbital motion of the star and infer the presence of an unseen planet. Therefore, the equations for those techniques are developed in the COM frame - it is the motion of the star that betrays the existence of an orbiting planet. For other techniques (direct imaging and transits) the motion of the star does not provide any useful information and we can simplify our analysis by working in the frame of reference of the star and studying the motion of the planet relative to the "stationary" star.
You intuitively switch back and forth between reference frames in real life. Like Tycho, we picture the Sun rising and setting, when in fact the Earth is spinning on its axis once every 24 hours. For most things that we do, a geocentric reference frame works just fine. But if we want to understand when Jupiter will be seen in the night sky, we need to switch to the Copernican heliocentric reference frame. All reference frames (if treated correctly) are equally valid; some reference frames are just easier for solving certain problems.
Orbital orientations are 3-dimensional
The fundamental plane of an orbit can be sketched on a piece of paper; to a reasonable approximation, it is flat (like the Figures showing elliptical orbits in the previous section) and can be thought of as having a 2-dimensional shape. However, the situation is more complex because orbits are randomly oriented in the 3-d volume of space, as shown in the figure below. From our view, the randomly oriented orbit is then projected back onto the plane of the sky with a 2-d shape that is different from the true fundamental plane orbit.
Imagine a circular orbit as a hula hoop. If orientation of this hula-hoop orbit is face-on to your line of site, then you see the full 2-d circular orbit projected as a circle onto the plane of the sky. If the orientation is edge-on, then you would see the orbit projected as a line. And if the orbit is inclined by some arbitrary angle (say 45 degrees) then the 2-d circular orbit would be projected as an ellipse. The time stamp on each observation allows astronomers to distinguish projection effects from the true orbital eccentricity.

The N-body problem
When there are more than two objects (i.e., more than just the star and one planet) in a system, the gravitational interactions of additional bodies of "N" objects can perturb the simple Keplerian orbit of a planet. In the Figure below, there are three objects (N = 3), a star and two planets. The inner planet will have a shorter orbital period than the outer planet (Kepler's third law). As the inner planet races around it's orbital track, it will feel an additional accelerating force (both forward and outward) every time it approaches the outer planet (the outer planet will also feel a small backward and inward force from the inner planet). This situation is reversed after the inner planet passes the outer planet; now the gravity from the outer planet pulls back on the inner planet. The smaller planet also tugs back on the more massive planet, but with a smaller perturbing effect.

At the level of measurement precision available to Tycho and Kepler, the planets in our solar system seemed to orbit like clockwork. However, even Newton worried that chaotic gravitational interactions between planets might require divine intervention to maintain stability.
Perturbation theory was developed by Lagrange and Laplace to study long range gravitational forces between planets in our solar system. However, the most effective way to understand non-Keplerian interactions in a multi-planet system is to carry out a computer simulation using an N-body code. These simulations treat planets as massive particles with a particular position and velocity and the Newtonian forces between all objects in the system are integrated to yield a net force at each time step that conserves energy and angular momentum.
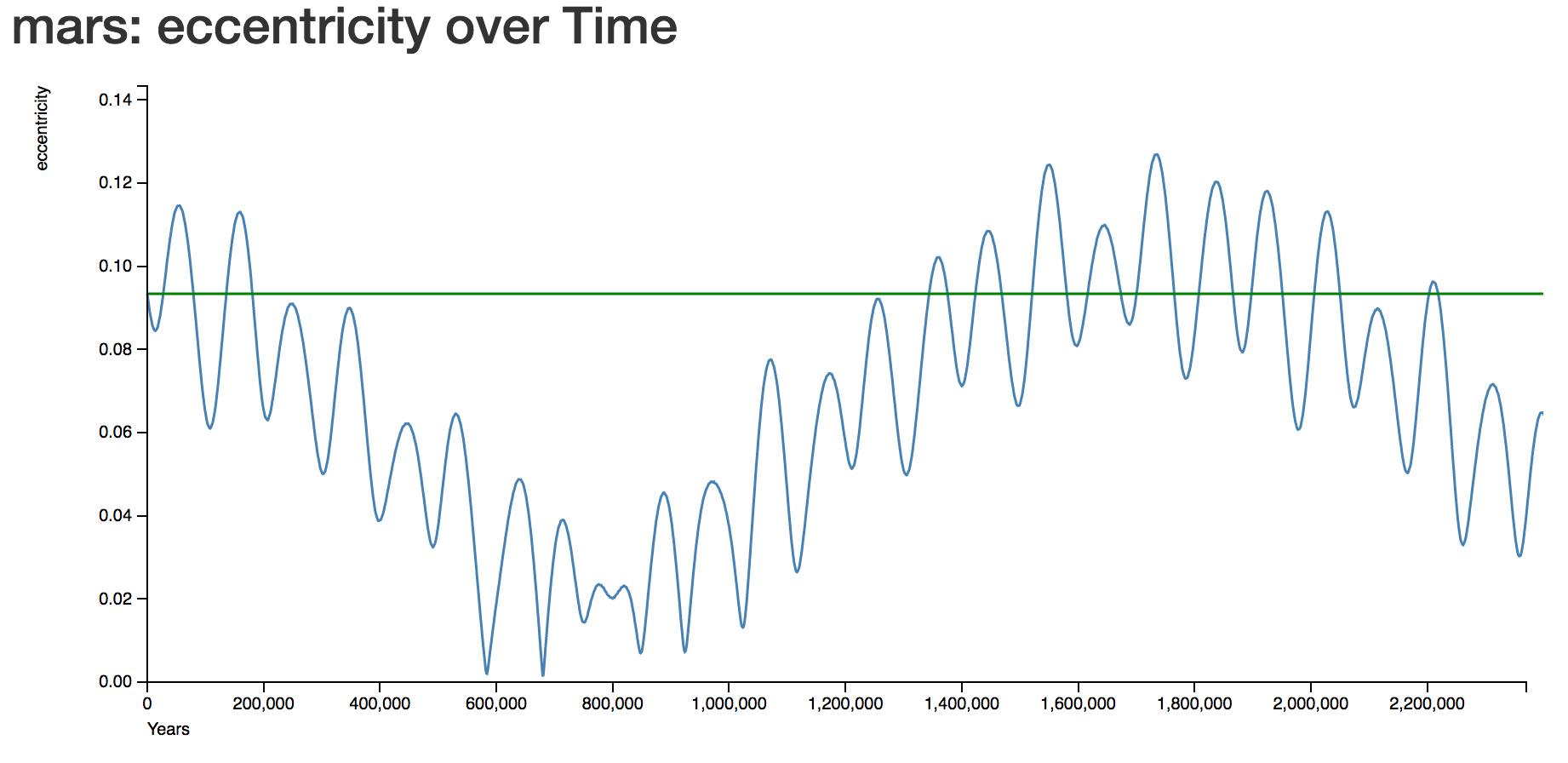
The non-Keplerian gravitational interactions that take place in our solar system are so small that our planets are considered to be dynamically stable for billions of years. The planets stay confined in a small neighborhood around their orbital tracks. However there are changes in eccentricity that occur because of planet-planet interactions. The Figure below shows the eccentricity of Mars over a 2 Million year N-body integration of the solar system.
If gravitational perturbations between planets are too large, the eccentricity of a planet will increase and the planet may collide with other planets or migrate to a different orbit. In some cases, the planets could fall into the star, or be completely ejected from the planetary system.