
12.19: Locomotion
- Page ID
- 13255
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)
What allows this cheetah to be so fast?
Do you think it has something to do with the placement of the limbs? Well, it does. Look closely at the cheetah's body. Can you describe why it is so fast?
Social Living in Mammals
Many mammals live in social groups. Social living evolved because it is adaptive. Consider these two examples:
- Herbivores such as zebras and elephants live in herds. Adults in the herd surround and protect the young, who are most vulnerable to predators.
- Lions live in social groups called prides. Adult females in the pride hunt cooperatively, which is more efficient than hunting alone. Then they share the food with the rest of the pride. For their part, adult males defend the pride’s territory from other predators.
Locomotion in Mammals
Mammals are noted for the many ways they can move about. Generally, their limbs are very mobile. Often, they can be rotated. Many mammals are also known for their speed. The fastest land animal is a predatory mammal. Can you guess what it is? Racing at speeds of up to 112 kilometers (70 miles) per hour, the cheetah wins hands down. In addition, the limbs of mammals let them hold their body up above the ground. That’s because the limbs are attached beneath the body, rather than at the sides as in reptiles (see Figure below).
 Limb Positions in Reptiles and Mammals. The sprawling limbs of a reptile keep it low to the ground. A mammal has a more upright stance.
Limb Positions in Reptiles and Mammals. The sprawling limbs of a reptile keep it low to the ground. A mammal has a more upright stance.Mammals may have limbs that are specialized for a particular way of moving. They may be specialized for running, jumping, climbing, flying, or swimming. Mammals with these different modes of locomotion are pictured in Figure below.
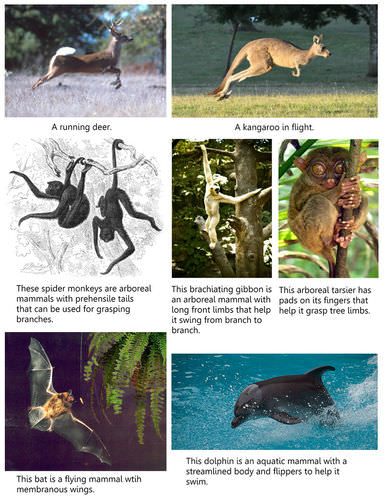 Mammalian Locomotion. Mammals have many different modes of locomotion.
Mammalian Locomotion. Mammals have many different modes of locomotion.The deer in the Figure above is specialized for running. Why? It has long legs and hard hooves. Can you see why the other animals in the figure are specialized for their particular habitats? Notice how arboreal, or tree-living animals, have a variety of different specializations for moving in trees. For example, they may have:
- A prehensile, or grasping, tail. This is used for climbing and hanging from branches.
- Very long arms for swinging from branch to branch. This way of moving is called brachiation.
- Sticky pads on their fingers. The pads help them cling to tree trunks and branches.
Summary
- Mammals live in social groups, which are an adaptive beneficial trait.
- Mammals have many ways of moving about and may move very quickly.
Review
- Name five types of movement found in mammals?
- A certain mammal has very long forelimbs. What does that suggest about where the animal lives and how it moves?
- What type of movement is found in the above question.
- What is the purpose of a prehensile tail?
| Image | Reference | Attributions |
|
[Figure 1] | License: CC BY-NC |
|
[Figure 2] | Credit: Lizard: Benny Trapp; Meerkat: Ken Banks Source: Lizard: commons.wikimedia.org/wiki/File:Benny_Trapp_Podarcis_milensis.jpg ; Meerkat: commons.wikimedia.org/wiki/File:Suricata_suricatta_-Durrell_Wildlife_Park ; _Jersey ; _UK-8.jpg License: Lizard: CC BY 3.0; Meerkat: CC BY 2.0 |
 |
[Figure 3] | Credit: Deer: Scott Bauer/Agricultural Research Society; Kangaroo: Chris Samuel; Spider monkey: Gustav Mützel; Gibbon: Troy B Thompson; Tarsier: Roberto Verzo; Bat: F Chanut; Dolphin: US National Oceanic and Atmospheric Administration Source: Deer: commons.wikimedia.org/wiki/File:Deer_running.jpg ; Kangaroo: http://www.flickr.com/photos/chrissamuel/5366854530/ ; Spider monkey: commons.wikimedia.org/wiki/File:Klammeraffe-drawing.jpg ; Gibbon: en.Wikipedia.org/wiki/File:Brachiating_Gibbon_%28Some_rights_reserved%29.jpg ; Tarsier: www.flickr.com/photos/verzo/1009489040/in/photostream/ ; Bat: commons.wikimedia.org/wiki/File:Bat_flying_at_night.png ; Dolphin: commons.wikimedia.org/wiki/File:Spotteddolphin1.jpg License: (Deer) Public Domain; (Kangaroo) CC BY 2.0; (Spider monkey) Public Domain; (Gibbon) CC BY 3.0; (Tarsier) CC BY 2.0; (Bat) CC BY 2.5; (Dolphin) Public Domain |