
8.4: Rotation Symmetry
- Page ID
- 2163
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Rotation less than 360 degrees that carries a shape onto itself.
Rotational symmetry is present when a figure can be rotated (less than \(360^{\circ}\)) such that it looks like it did before the rotation. The center of rotation is the point a figure is rotated around such that the rotational symmetry holds.
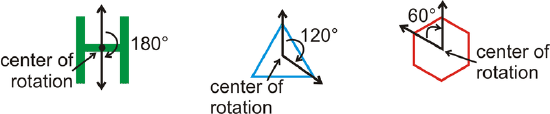
For the \(H\), we can rotate it twice, the triangle can be rotated 3 times and still look the same and the hexagon can be rotated 6 times.
What if you had a six-pointed star and you rotated that star less than \(360^{\circ}\)? If the rotated star looked exactly the same as the original star, what would that say about the star?
Example \(\PageIndex{1}\)
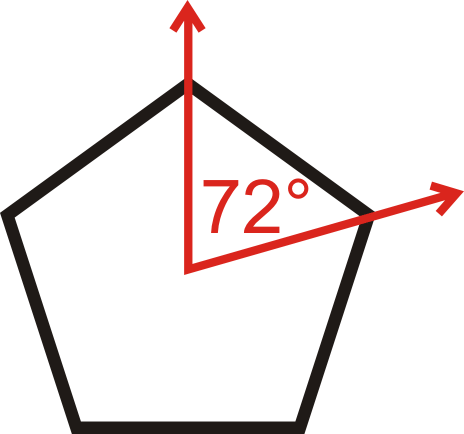
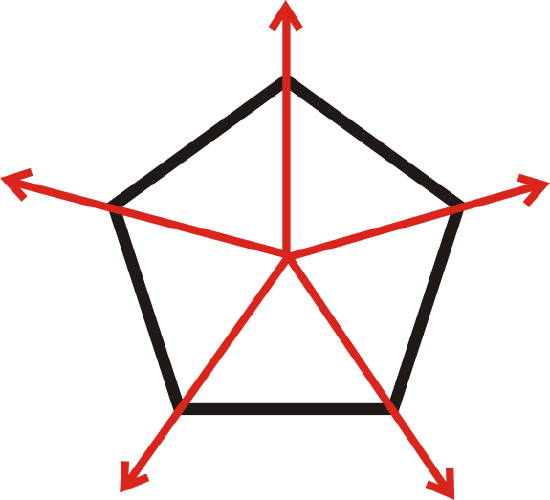
Determine if the figure below has rotational symmetry. Find the angle and how many times it can be rotated.
Solution
The pentagon can be rotated 5 times. Because there are 5 lines of rotational symmetry, the angle would be \(\dfrac{360^{\circ}}{5}=72^{\circ}\).
Example \(\PageIndex{2}\)
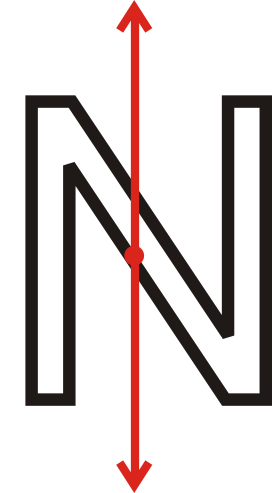
Determine if the figure below has rotational symmetry. Find the angle and how many times it can be rotated.

Solution
The N can be rotated twice. This means the angle of rotation is \(180^{\circ}\).
Example \(\PageIndex{3}\)
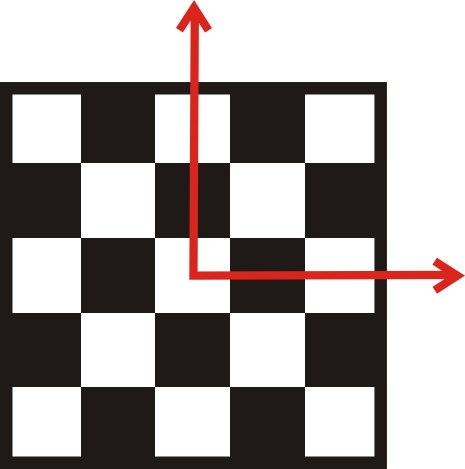
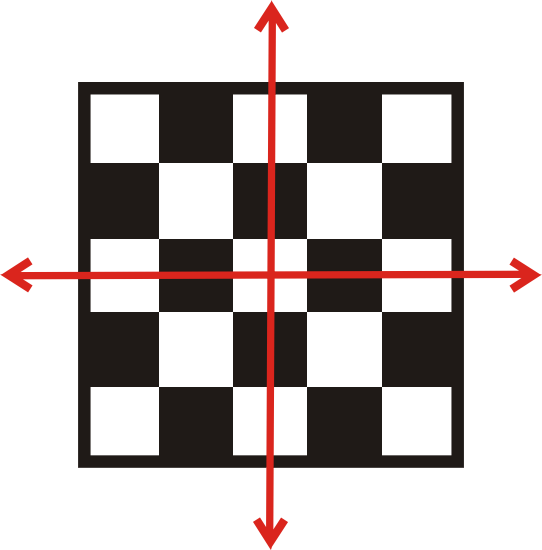
Determine if the figure below has rotational symmetry. Find the angle and how many times it can be rotated.
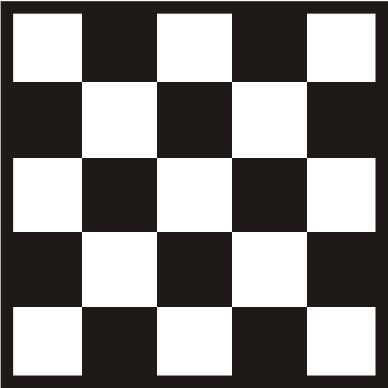
Solution
The checkerboard can be rotated 4 times. There are 4 lines of rotational symmetry, so the angle of rotation is \(\dfrac{360^{\circ}}{4}=90^{\circ}\).
Example \(\PageIndex{4}\)
Find the angle of rotation and the number of times each figure can rotate.
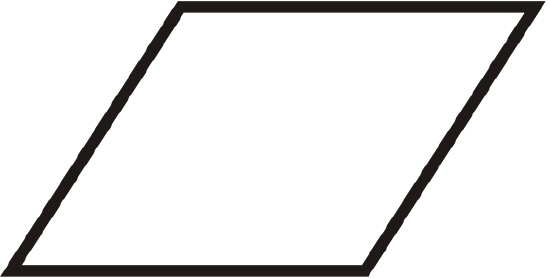
Solution
The parallelogram can be rotated twice. The angle of rotation is \(180^{\circ}\).
Example \(\PageIndex{5}\)
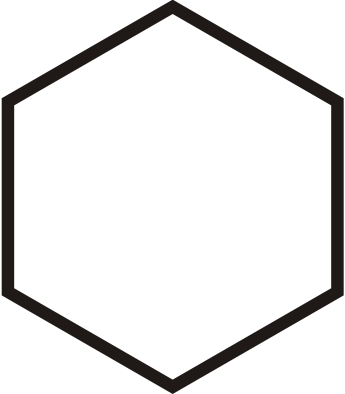
Solution
The hexagon can be rotated six times. The angle of rotation is \(60^{\circ}\).
Review
- If a figure has 3 lines of rotational symmetry, it can be rotated _______ times.
- If a figure can be rotated 6 times, it has _______ lines of rotational symmetry.
- If a figure can be rotated n times, it has _______ lines of rotational symmetry.
- To find the angle of rotation, divide \(360^{\circ}\) by the total number of _____________.
- Every square has an angle of rotation of _________.
Determine whether each statement is true or false.
- Every parallelogram has rotational symmetry.
- Every figure that has line symmetry also has rotational symmetry.
Determine whether the words below have rotation symmetry.
- OHIO
- MOW
- WOW
- KICK
- pod
Find the angle of rotation and the number of times each figure can rotate.
-
Figure \(\PageIndex{12}\) -
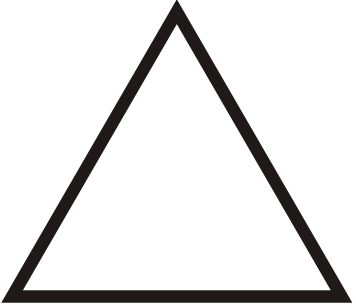
Figure \(\PageIndex{13}\) -

Figure \(\PageIndex{14}\)
Determine if the figures below have rotation symmetry. Identify the angle of rotation.
-
Figure \(\PageIndex{15}\) -

Figure \(\PageIndex{16}\) -

Figure \(\PageIndex{17}\)
Review (Answers)
To see the Review answers, open this PDF file and look for section 12.2.
Vocabulary
| Term | Definition |
|---|---|
| rotational symmetry | When a figure can be rotated (less than 360^{\circ}\)) such that it looks like it did before the rotation. The center of rotation is the point a figure is rotated around such that the rotational symmetry holds. |
| Center of Rotation | In a rotation, the center of rotation is the point that does not move. The rest of the plane rotates around this fixed point. |
| Rotation | A rotation is a transformation that turns a figure on the coordinate plane a certain number of degrees about a given point without changing the shape or size of the figure. |
| Rotation Symmetry | A figure has rotational symmetry if it can be rotated less than \(360^{\circ}\) around its center point and look exactly the same as it did before the rotation. |
| Symmetry | A figure has symmetry if it can be transformed and still look the same. |
Additional Resources
Interactive Element
Video: Rotation Symmetry Principles - Basic
Activities: Rotation Symmetry Discussion Questions
Study Aids: Symmetry and Tessellations Study Guide
Practice: Rotation Symmetry
Real World: This End Up